Il sistema EnVES EVO 1812, in base ai risultati delle prove superate ai sensi della norma UNI 10772:2016, è in grado di riconoscere in classe A (percentuale di corretto riconoscimento maggiore del 98%), in condizioni di traffico canalizzato e non canalizzato, nelle condizioni ambientali diurne e notturne, le targhe delle diverse tipologie di veicoli (posteriore autoveicoli - formati A e B, anteriori autoveicoli motoveicoli e ciclomotori), previste dagli articoli 250 e 258 del D.P.R. n. 495/92.
Il sistema EnVES EVO 1812 ha inoltre superato le previste prove in pista (sempre in classe A) fino alla velocità di 205 km/h.
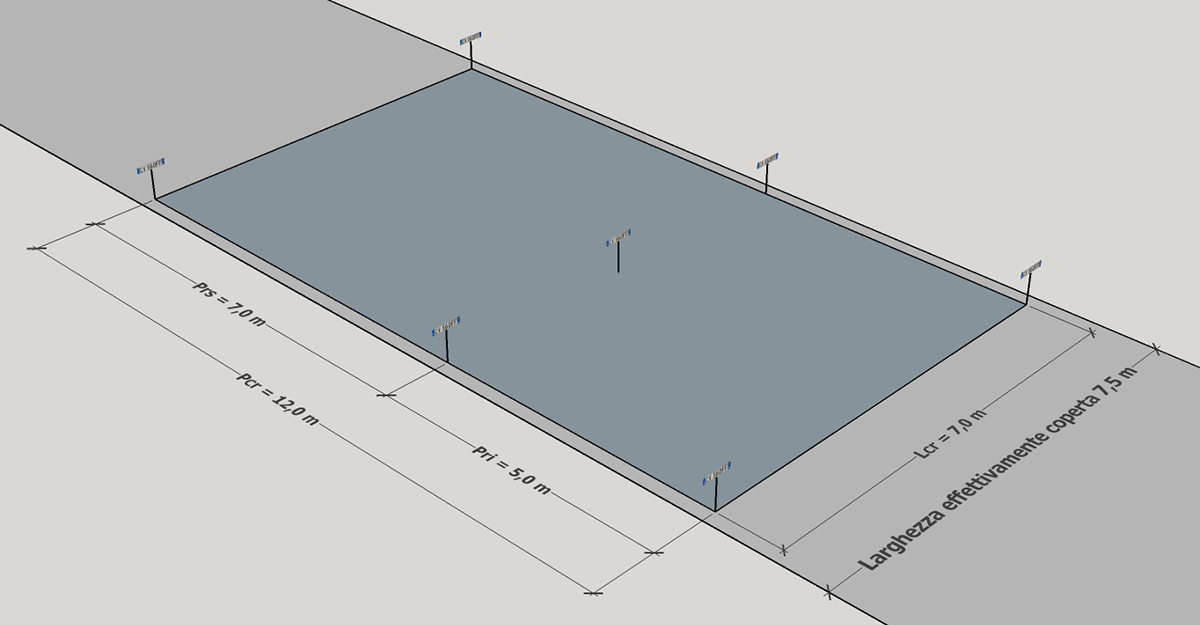
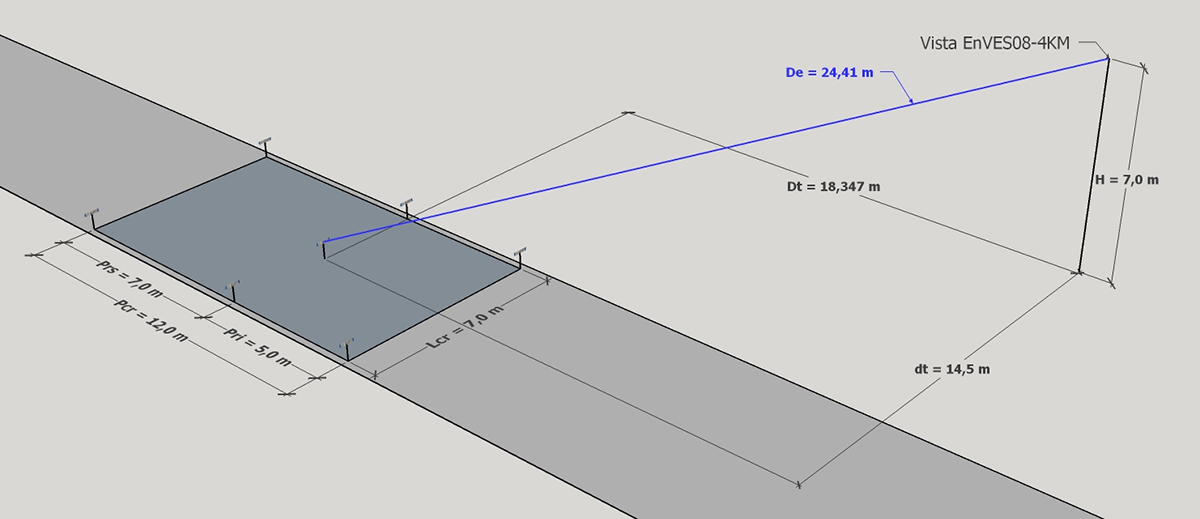
Il sistema EnVES EVO 1812 è in grado di svolgere le funzioni, con le prestazioni certificate dalle Prove UNI 10772 con i seguenti limiti geometrici:
- a. distanza effettiva tra sistema di ripresa e targa: 24 m;
- b. altezza massima da terra dell’unità di ripresa: 7 m;
- c. angolo massimo di disassamento dell’unità di ripresa rispetto al piano targa, misurato sulla mezzeria della corsia più esterna da controllare: 40°;
- d. larghezza massima del campo di riconoscimento a 0 lx: 7 m e profondità del campo di riconoscimento: 12 m. (area certificata di utilizzo 84 m2).
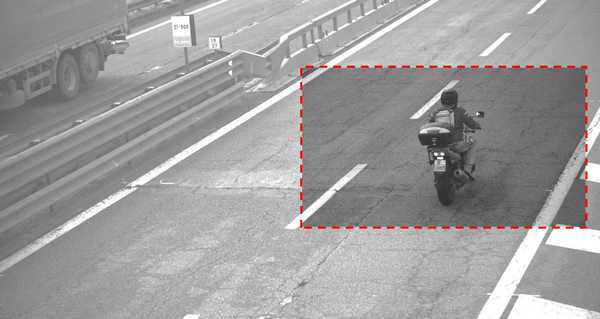
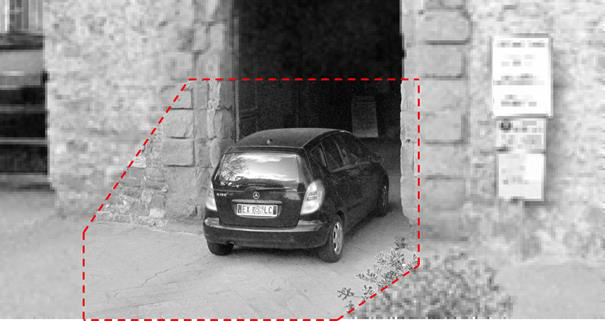
In particolare l’ampissima area certificata di utilizzo (prodotto tra larghezza e profondità del campo di riconoscimento) tra le più alte disponibili tra i sistemi omologati, e praticamente corrispondente a tutta l’immagine inquadrata, garantisce sempre l’utilizzo nel rispetto delle geometrie certificate in quanto i veicoli immortalati nell’immagine ricado sempre all’interno dell’area di riconoscimento certificata e garantisce l’agevole positiva verifica della conformità delle installazioni alle specifiche convalidate con i rapporti di prova UNI 10772:2016 (capitolo 10 norma UNI 10772:2016).
Diversamente, in altri sistemi di minore pregio tecnico, in cui l’area certificata di utilizzo è molto inferiore, in fase di verifica di conformità delle installazioni potrebbero spesso risultare non conformi.



 AREA RISERVATA
AREA RISERVATA