I rilevatori di velocità presidiati EnVES EVO MVDm 1507 consentono il rilevamento della velocità basandosi su un sensore in tecnologia Laser. Si tratta di un meccanismo che consente di individuare i veicoli in modalità mono e bidirezionale, con riprese effettuate sia dal lato posteriore che dall’anteriore, provvedendo in questo caso ad offuscare il parabrezza del veicolo e quindi il volto degli occupanti, nonché consente la classificazione automatica dei veicoli in transito nelle macroclassi leggero e pesante attribuendo automaticamente lo specifico differente limite di velocità.




I rilevatori di velocità presidiati effettuano l'operazione di rilevamento per mezzo del sensore Laser Noptel CMP3. Si tratta di un sensore laser convenientemente utilizzato per la misura della velocità dei veicoli e per la loro classificazione, in base all’altezza/lunghezza od entrambe degli stessi.
Il sensore è dotato un diodo laser che emette un piccolo fascio di luce con una lunghezza d’onda di 905 nanometri. La luce laser emessa è conforme alle norme per la classificazione di sicurezza in classe 1 secondo la norma IEC/EN 60825 e quindi non comporta rischio alcuno per gli automobilisti.
Il sensore LASER opera con il seguente principio: al momento dell’emissione dell’impulso inizia a calcolare il tempo di ciclo (un ciclo è dato dal tempo che impiega il fascio luminoso a raggiungere il bersaglio ed a tornare indietro). Quando il fascio luminoso incontra la superficie di un veicolo la luce viene riflessa verso il sensore. La ricezione di un impulso determina la misura di tempo impiegato dal fascio laser per andare fini al veicolo e tornare indietro: il “tempo di volo”. Dato che la velocità della luce è costante, il dispositivo valutando il tempo di volo automaticamente determina la distanza del bersaglio (il veicolo).
Poiché il laser con cui viene equipaggiato il sensore CMP3 è in grado di trasmettere 3000 impulsi al secondo è possibile effettuare circa 3000 misure di distanza per secondo.
Da quando un veicolo entra nell’area di sensibilità del dispositivo laser fintantoché non esce dalla stessa, vengono acquisite e memorizzate tutte le distanze, il dispositivo analizza i valori e ne ricava una indicazione di velocità e di correlazione tra i valori usando l’algoritmo dei minimi quadrati. Una volta che il veicolo è uscito dall’area di misura viene calcolata la velocità confrontando i risultati ottenuti dalle misure.
NB: il dispositivo LASER, rilevando via via le distanze del veicolo dal sensore, percependo quindi la direzione del moto in allontanamento od in avvicinamento, consente il rilevamento della velocità indipendentemente dalla direzione di marcia dei veicoli rispetto al sensore. Essendo il fascio laser molto direttivo è necessario utilizzare un sensore NOPTEL CMP3 per ciascuna corsia su cui si necessita di rilevare la velocità.
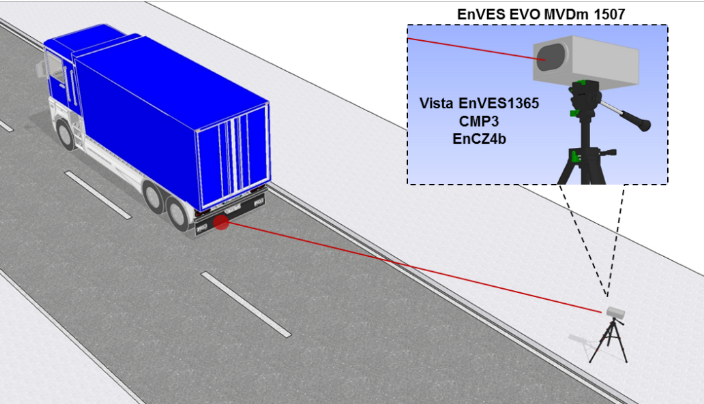
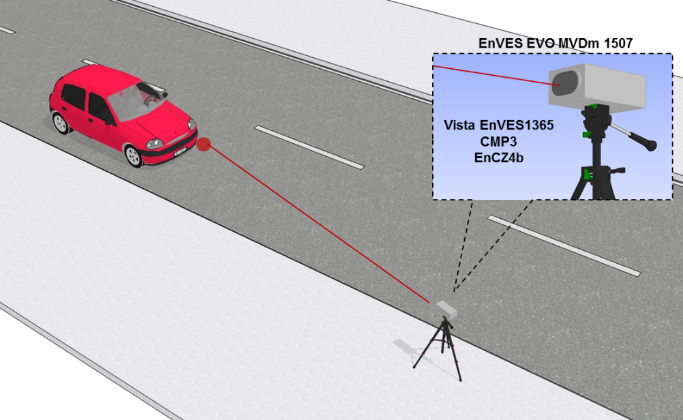
In tale configurazione il laser può essere utilizzato per rilevare la velocità dei veicoli e per discriminare i veicoli in leggeri e pesanti in base alla loro lunghezza (qualora la strada abbia limiti diversi a seconda della classe del veicolo); mentre la misurazione della velocità è sempre possibile indipendentemente dal moto dei veicoli (in avvicinamento od in allontanamento) la classificazione nel caso in cui il sensore laser sia collocato in basso (su treppiede) può avvenire soltanto se il rilevamento avviene dal posteriore dei veicoli in allontanamento dal laser.
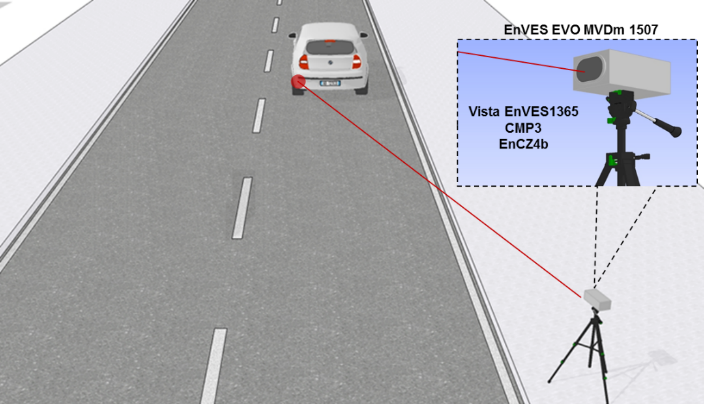
In questo caso il dispositivo viene posizionato a bordo carreggiata ad un’altezza compresa fra i 50 e i 180 cm orientato parallelo all’asfalto in modo da attraversare diagonalmente le corsie interessate. Per semplicità è da preferirsi l’utilizzo dell’apparato di ripresa montato in prossimità del sensore CMP3, per fare ciò è consigliabile utilizzare una struttura che raccolga i dispositivi interessati in modo da agevolare l’orientamento per mezzo di un treppiede ed eventualmente proteggerli dagli agenti atmosferici.
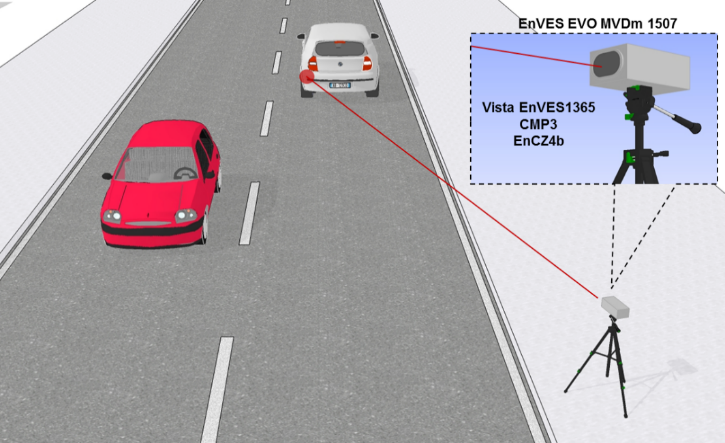
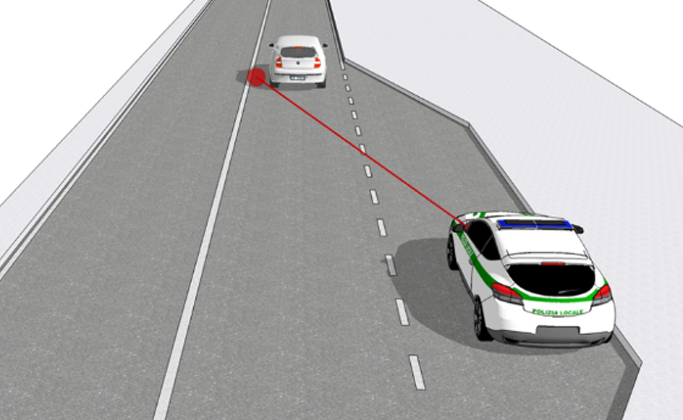
Le immagini che seguono rappresentano le tipiche tipologie di utilizzo del sistema con collocamento sensori su treppiedi oppure a bordo auto.
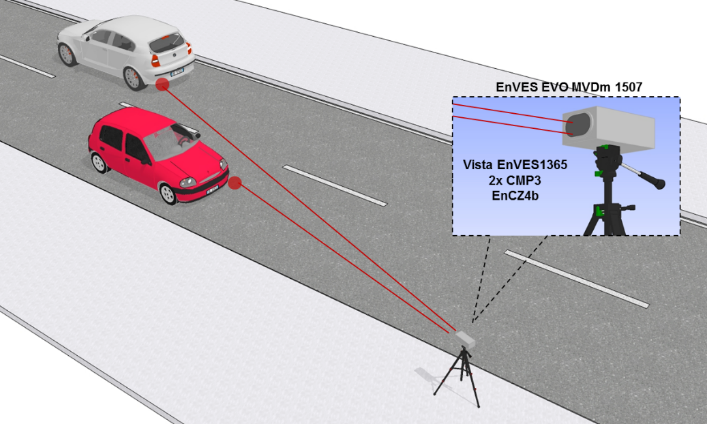
In tale modalità di funzionamento il sensore laser è in grado di misurare la velocità sulle corsie adiacenti.
Nel caso di monitoraggio dei sensi di marcia in allontanamento è possibile attivare la funzionalità di classificazione automatica dei veicoli che avviene attraverso la stima della lunghezza (valutata attraverso la velocità e tempo di impegno del laser).
Analogamente il sistema può essere allestito per posizionamento a bordo dei veicoli degli organi di polizia.
Il sistema può rilevare anche i veicoli in avvicinamento, in questo caso, per garantire la privacy dei conducenti, viene attivata la funzionalità di mascheramento automatico del parabrezza anteriore.
Per il rilevamento su due corsie adiacenti è possibile utilizzare il sistema dotandolo di due sensori laser e una singola telecamera che inquadra entrambe le corsie.
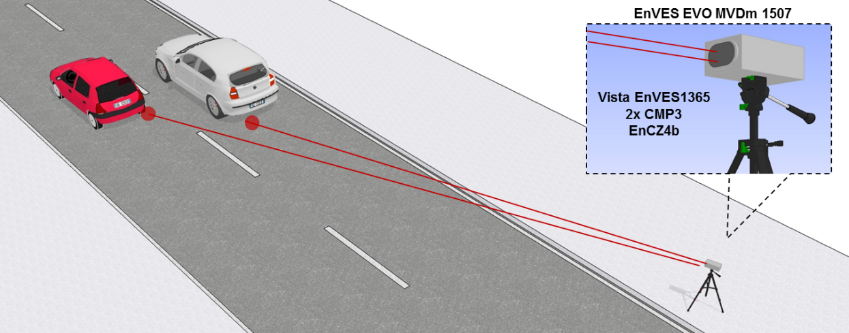
Per coprire due corsie con opposto senso di marcia con un solo sistema di ripresa Vista EnVES1365 è consigliabile posizionarsi in modo che la corsia che viene ripresa dall’anteriore sia quella più vicina affinché le piccole targhe anteriori risultino più leggibili.
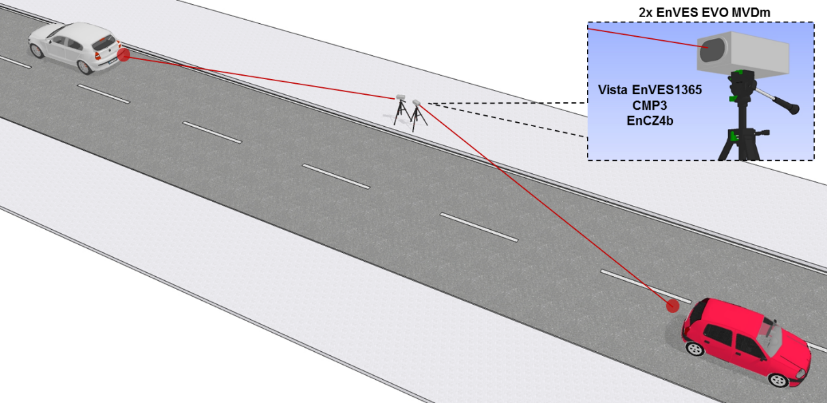
Allo stesso modo se si dispone di due sistemi EnVES EVO MVDm 1507 con singolo laser CMP3 è agevole combinarli per coprire le più disparate situazioni. Ad esempio se è necessario coprire due corsie opposte ed anche classificare su di esse si possono utilizzare due sistemi indipendenti posizionati per riprendere i veicoli in allontanamento.
Le immagini che documentano un transito in violazione vengono archiviate in files in un formato proprietario chiamato ETF (Engine Transit File); tale file contiene, oltre all’immagine o sequenza di immagini, anche i dati del transito quali data, ora, corsia, numero di matricola dell’apparato, nome dell’agente, eventuali coordinate GPS, ecc.
Le suddette informazioni vengono raccolte in un unico buffer a cui viene applicata una firma digitale prima di essere salvato su file. La firma digitale viene calcolata tramite un algoritmo RSA con chiavi da 2048 bit ed algoritmo di hash SHA-256 (gli stessi indicati nelle “regole per il riconoscimento e la verifica del documento informatico” dell’Agenzia per l’Italia Digitale).
Il file ETF viene criptato in maniera asimmetrica tramite una chiave pubblica che deve essere richiesta al gestore del server centrale: una volta criptato il file può essere aperto solo utilizzando la chiave privata che si consiglia di mantenere esclusivamente sul server centrale.
Si fa presente che durante le attività di manutenzione, per consentire la verifica del funzionamento del sistema vengono generate delle immagini in chiaro utilizzabili esclusivamente per la messa a punto del sistema.
Inoltre, al fine di consentire l’eventuale contestazione immediata delle violazioni, il sistema genera anche le immagini in chiaro. In questo caso comunque la documentazione probatoria dell’infrazione è costituita dal file in formato ETF firmato digitalmente.
In qualsivoglia circostanza il sistema rilevi una violazione per un veicolo in avvicinamento (e dunque inquadrato dall’anteriore) viene eseguito un SW che si occupa di localizzare la targa anteriore del veicolo ed in funzione della sua localizzazione all’interno dell’immagine ed alla sua dimensione provvede automaticamente a coprire la porzione dell’immagine che, in conseguenza dei parametri di cui sopra, contiene il parabrezza del veicolo.
Se, per un determinato transito in avvicinamento il sistema non riesce a localizzare la targa con una certa affidabilità il transito viene SCARTATO.
N.B.: il software NON SI PREOCCUPA NE’ CERCA DI RICONOSCERE LA TARGA MA SOLO DI LOCALIZZARLA.
L’offuscamento può essere realizzato mediante l’applicazione di un riquadro di colore nero, rosso, blu o verde o con filtro Blur o Pixelize come mostrato nelle immagini che seguono.
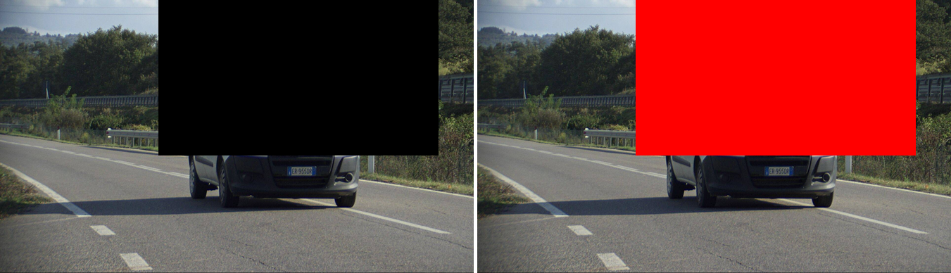
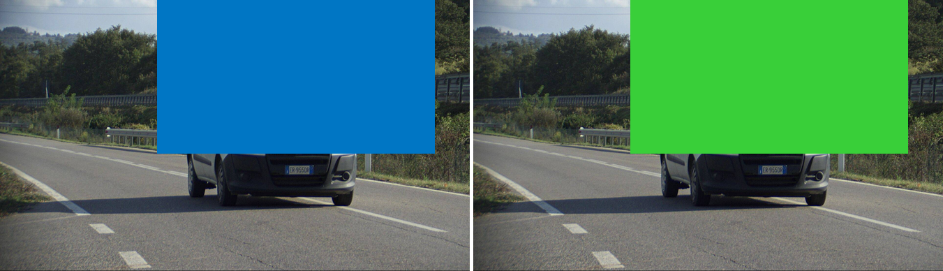
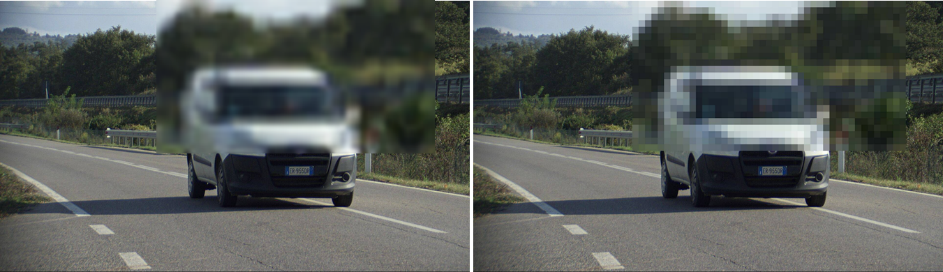
Di default viene utilizzato un filtro di tipo Pixelize che fa perdere il dettaglio della porzione dell’immagine su cui è applicato.
Di seguito sono riportati alcuni esempi di infrazioni riprese dai rilevatori di velocità presidiati EnVES EVO MVDm 1507.
Infrazioni riprese dal retro (corsia vicina)




Infrazioni riprese dal retro (corsia vicina)



Infrazioni classificate mezzi pesanti


Infrazioni riprese frontalmente



 AREA RISERVATA
AREA RISERVATA